Integrantes do grupo:
- Douglas Fernandes da Costa (Matrícula: 20183013697)
- Larissa de Castro Braga (Matrícula: 20183000581)
- Lucas Coelho de Lima (Matrícula: 20183001542)
- Pedro de Souza Batista Campos (Matrícula: 20183013338)
Ideia
Este projeto tem como ideia otimizar a produção de energia solar, através do acoplamento de um tracker ao painel, aproveitando assim, toda a luminosidade do dia.
Conceito
Geração de energia solar com auto regulação para sistemas elétricos ilhados.
Introdução
De acordo com um levantamento realizado pela Agência Nacional de Energia Elétrica (Aneel), em 2017 existiam 1 milhão de residências sem energia elétrica no Brasil, ocasionando em diversos empecilhos na vida desta parcela da população que acaba ficando excluída do uso de eletrodomésticos, eletroeletrônicos, e com isso, tem a sua qualidade de vida reduzida.
Como alternativa para essa problemática, esse projeto propõem-se a criar um protótipo de um sistema de alimentação de energia elétrica à essas residências que não possuem ligação à rede das concessionárias de energia elétrica. Ademais, esse circuito pode ser utilizado em residências que recebem energia das concessionárias locais, de forma a alimentar esse circuito quando houver falta de energia ou blackout, ou quando o usuário desejar.
Para otimizar a geração de energia, o painel fotovoltaico será acoplado em um tracker, que tem como função alterar a inclinação do painel de forma que esteja apontado na direção do Sol. A Figura 1 mostra a movimentação do painel fotovoltaico acompanhando o movimento do Sol no céu:
| Fig. 1: esquema de funcionamento do tracker de um painel fotovoltaico. Fonte: https://goo.gl/1bLJBQ |
Entre as vantagens do acoplamento do painel solar em um tracker estão a geração de uma quantidade maior de energia elétrica em uma mesma área e uma qualidade superior em relação à potência entregue ao circuito. A Figura 2 mostra exatamente essa diferença na potência entregue: a curva cinza representa um painel solar fixo, enquanto a curva verde mostra a potência entregue com a utilização do tracker.
 |
| Fig. 2: diferença na entrega de potência à um circuito com o painel fotovoltaico fixo e móvel. Fonte: https://goo.gl/1bLJBQ |
Metodologia
Microcontrolador Arduino Mega 2560
O microcontrolador utilizado neste projeto é o Arduino Mega 2560. É uma placa desenvolvida para que todos os interessados na área de eletrônica e programação possam desenvolver projetos sem muito conhecimento teórico nas áreas citadas. A placa do Arduino Mega possui 54 portas digitais e 16 entradas analógicas, permitindo assim, a conexão de vários sensores e atuadores, conforme a necessidade. A sua programação foi feita utilizando o software "Arduino IDE" que pode ser instalado acessando o site da fabricante do microcontrolador.
 |
Fig. 4: Arduino Mega 2560 Fonte: https://goo.gl/CBbekG |
Placa fotovoltaica
Neste projeto foi utilizada uma placa fotovoltaica dimensões 22x20 cm. Foram feitos testes com a placa em ambientes abertos com alta incidência solar e em ambientes fechados com iluminação artificial (lâmpadas). No primeiro caso citado, em um horário próximo às 12h foi obtida uma tensão na saída por volta de 21V, enquanto na segunda situação foi obtida uma tensão entre 9 e 12V. É interessante comentar que a tensão de saída já é continua, logo não foi necessário projetar um circuito retificador.
LDR (Sensor de luminosidade)
 |
| Fig.: Placa fotovoltaica utilizada neste projeto. |
 |
| Fig.: Especificações da placa fotovoltaica usada neste projeto e cabos com a tensão de saída. |
LDR (Sensor de luminosidade)
O LDR (Light Dependent Resistor) é um fotoresistor. Ou seja, varia a sua resistência conforme a variação de luz que incide sobre ele. Para a medição da sua resistência, ele foi colocado em um circuito de divisor de tensão, juntamente com um resistor de 1kΩ. Dessa forma, é possível aferir o valor de tensão entre os seus terminais através das portas analógicas do Arduino Mega e acionar os motores.
 |
| Fig. 5: Divisor de tensão com o LDR. Fonte: os autores. |
Interface com o usuário
J. Leite descreve a interface de comunicação homem-máquina como um "artefato que permite ao usuário controlar e avaliar o funcionamento do mesmo através de dispositivos sensíveis às suas ações e capazes de estimular a sua percepção".
Sendo assim, para informar ao usuário sobre a carga da bateria e qual sistema está sendo utilizado na alimentação, será usado um display LCD 20x4 (20 caracteres e 4 colunas), além de uma chave de acionamento, que permitirá ao usuário selecionar manualmente qual dos sistemas utilizar para a alimentação, desde que haja carga na bateria.
Para a conexão do Display LCD com o microcontrolador foi feito um shield que permite controlar através de um potenciômetro, o contraste da tela do display e também conectar os pinos de dados ao Arduino. As Figuras 6 e 7 mostram o layout da placa confeccionada e a sua visão 3D, respectivamente, usando o software Proteus:
J. Leite descreve a interface de comunicação homem-máquina como um "artefato que permite ao usuário controlar e avaliar o funcionamento do mesmo através de dispositivos sensíveis às suas ações e capazes de estimular a sua percepção".
Sendo assim, para informar ao usuário sobre a carga da bateria e qual sistema está sendo utilizado na alimentação, será usado um display LCD 20x4 (20 caracteres e 4 colunas), além de uma chave de acionamento, que permitirá ao usuário selecionar manualmente qual dos sistemas utilizar para a alimentação, desde que haja carga na bateria.
 |
| Fig. 6: Display LCD 20x4 usado no projeto. Fonte: https://goo.gl/evQdzx |
 |
| Fig. 7: layout da placa no ARES do Proteus. Fonte: os autores. |
 |
| Fig. 8: visão em 3D da placa no ARES do Proteus. Fonte: os autores. |
Circuito de controle do carregamento da bateria
Sabemos que a energia gerada por uma placa solar não é constante durante todo o dia, uma vez que a radiação solar não é constante, considerando isso foi criada uma placa com um circuito eletrônico com a intenção de maximizar a energia gerada e garantir também a segurança das placas e dos circuitos por ela alimentados.
Na entrada do circuito foi utilizado um diodo retificador para garantir que a placa não foi ligada com os polos invertidos (o que queimaria o circuito), logo após a tensão é regulada por um regulador ajustável LM317, cujo controle da tensão de saída é feito pelo trimpot visto na imagem, já regulada a tensão de saída segue para recarregar a bateria. Sabemos que caso a bateria continue a se carregar mesmo após a carga estar completa ela corre o risco de explodir, por isso implementamos a placa com um circuito de controle composto por um diodo zener e um transistor BC548, onde quando a pilha estiver com 4V(cheia) a saída é jogada para o terra, e quando a saída estiver com 3,7(parcialmente vazia) o circuito é acionado para alimentar a placa.
Sabemos que a energia gerada por uma placa solar não é constante durante todo o dia, uma vez que a radiação solar não é constante, considerando isso foi criada uma placa com um circuito eletrônico com a intenção de maximizar a energia gerada e garantir também a segurança das placas e dos circuitos por ela alimentados.
Na entrada do circuito foi utilizado um diodo retificador para garantir que a placa não foi ligada com os polos invertidos (o que queimaria o circuito), logo após a tensão é regulada por um regulador ajustável LM317, cujo controle da tensão de saída é feito pelo trimpot visto na imagem, já regulada a tensão de saída segue para recarregar a bateria. Sabemos que caso a bateria continue a se carregar mesmo após a carga estar completa ela corre o risco de explodir, por isso implementamos a placa com um circuito de controle composto por um diodo zener e um transistor BC548, onde quando a pilha estiver com 4V(cheia) a saída é jogada para o terra, e quando a saída estiver com 3,7(parcialmente vazia) o circuito é acionado para alimentar a placa.
 |
| Fig.9: Placa confeccionada. |
 |
| Fig. 10: Esquemático do circuito de controle do carregamento da bateria. |
Motores e circuito de acionamento dos motores
O motor de passo unipolar 28BYJ-48 foi usado para fazer com que o painel solar girasse acompanhando a luz solar. Foi usado um motor de passo ao invés de um servo motor, devido a sua alta precisão (5,625°). Para o seu acionamento é necessário conectar um driver (neste projeto, foi usado o driver ULN 2003), pois este converte os sinais digitais vindos do Arduino para sinais de potência capazes de acionar o motor. É fundamental que a alimentação do motor não seja feita através dos pinos de +5V e GND do Arduino, pois este não fornece um valor de corrente suficiente para acionar o motor, sendo possível a queima da placa do microcontrolador.
 |
| Fig: Motor de passo e módulo de controle ULN 2003. |
Durante a confecção da estrutura mecânica responsável pela sustentação e movimentação da placa, foi-se necessário usar uma caixa de redução externa ao motor de passo, pois ao reduzir a velocidade de giro do motor, aumenta-se o torque, sendo possível assim, o giro de toda a estrutura de sustentação da placa fotovoltaica e a mesma. A caixa de redução utilizada foi retirada de um motor de parabrisa de carro.
 |
| Fig.: Detalhe da caixa de redução do motor de parabrisa acoplada no eixo do motor de passo. |
 |
| Fig.: Sequência de acionamento do motor unipolar no modo passo completo normal. |
Inicialmente, parte mecânica estava sendo estudada com base em projetos já desenvolvidos. Entretanto, para garantir uma maior autenticidade ao trabalho desenvolvido pelo nosso grupo decidimos desenvolver nós mesmos o mecanismo de movimentação da placa solar. A pesquisa realizada forneceu toda a base para o planejamento.
Foram desenvolvidos dois modelos iniciais, na qual foram planejados para a movimentação da placa nos dois eixos principais, Norte-Sul e Leste-Oeste. Com o estudo do modelo 1, porém foi verificado uma deficiência quanto a movimentação em um dos eixos. Esse problema foi um dos empecilhos para adotar o dito modelo. Já com o modelo 2, encontramos outro problema, o arco dentado, também presente no modelo 1. A peça citada é complicada de ser construída e cara para ser comprada devido às características particulares.
Dessa maneira, com o auxílio de um mecânico experiente, servidor do CEFET-MG, foi desenvolvido um sistema completamente novo, na qual possibilitará a placa a movimentação da placa no eixo Leste-Oeste, representado no modelo 3. Esse modelo foi desenvolvido de maneira prática e com ideias de terceiros, que facilitou a montagem da estrutura.
Quanto ao eixo Norte-Sul, o sistema permanecerá fixo, devido a pouco diferença de potência entregue à saída de alimentação. Para corrigir essa pequena deficiência, a placa deverá ser montada numa estrutura na qual terá aproximadamente 20o em relação a horizontal, que está relacionado com a latitude na qual nos encontramos. Essa montagem possibilitará um melhor aproveitamento dos raios solares em dias de verão, por exemplo, na qual a posição do planeta favorece à incidência solar na região na qual será instalada.
Para para fins meramente ilustrativos, o modelo não contou com essa angulação, devido ao tempo de execução e prazo para apresentação final do trabalho executado.
Assim foi verificado, por meio de etapas e processos de estudos, que por mais belo que seja o planejamento, mudanças bruscas no projeto podem ocorrer, como acontecido em nosso projeto. Por isso que é necessário, um sistema flexível que permita alterações quando necessário.
 |
| Fig.: Modelo 1 da estrutura mecânica. |
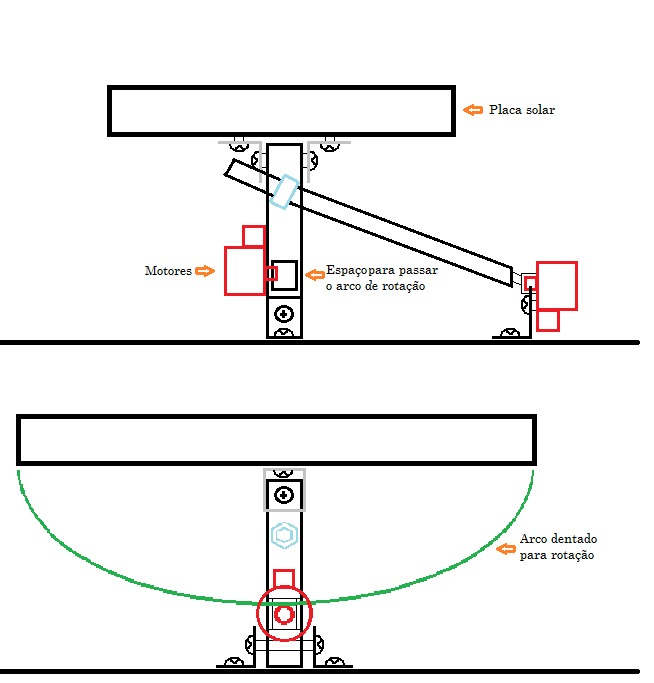 |
| Fig.: Modelo 2 da estrutura mecânica. |
 |
| Fig.: Modelo 3 da estrutura mecânica. |
 |
| Fig.: Estrutura confeccionada. |
 |
| Fig.: Estrutura confeccionada. |
 |
| Fig.: Estrutura confeccionada. |
Conclusão
O desenvolvimento do sistema de alimentação independente com painel solar propiciou grandes avanços na capacitação dos integrantes do grupo quanto ao execução de um projeto, que abrange as etapas da ideia até a prototipagem. O projeto do sistema, englobou toda o processo de criação, transformando as pesquisas, os conhecimentos, modelos, em material palpável, que poderá ser aplicado em diversos segmentos de geração autossustentável.
Iniciamos com uma ideia mais geral, que foi sendo trabalhada durante toda a evolução do projeto. Com todas as informações necessárias, o nosso sistema foi sendo reformulado em pequenos pontos, até o protótipo final. Um exemplo, trata-se do sistema mecânico, que passou por reformulações até o fim do processo. Esse aspecto, destacou o real valor da Teoria do Funil, que auxilia para a adoção dos passos subsequentes, o que reduziu até o fim as opções errôneas a serem adotadas nesse processo. Entretanto, essas reformulações acabava diminuindo a flexibilidade do projeto, o que em alguns momentos, nos colocou em situação de adequação imediata, com o layout da placa dos circuitos de controle.
Apesar de todos os empecilhos durante o desenvolvimento do projeto e construção do protótipo, obtemos um resultado muito satisfatório, pois superou todas as expectativas empregadas. O tempo, a falta de recursos e conhecimento em determinadas áreas, foram uma barreira que foi transposta com o trabalho de cada um dos indivíduos do grupo.
Em suma, o processo de criação garantiu a experiência de desenvolvimento tecnológico, impulsionando a busca de novos saberes, verificando na prática a etapas citadas por Slack em seu livro, “Administração da Produção”.
Iniciamos com uma ideia mais geral, que foi sendo trabalhada durante toda a evolução do projeto. Com todas as informações necessárias, o nosso sistema foi sendo reformulado em pequenos pontos, até o protótipo final. Um exemplo, trata-se do sistema mecânico, que passou por reformulações até o fim do processo. Esse aspecto, destacou o real valor da Teoria do Funil, que auxilia para a adoção dos passos subsequentes, o que reduziu até o fim as opções errôneas a serem adotadas nesse processo. Entretanto, essas reformulações acabava diminuindo a flexibilidade do projeto, o que em alguns momentos, nos colocou em situação de adequação imediata, com o layout da placa dos circuitos de controle.
Apesar de todos os empecilhos durante o desenvolvimento do projeto e construção do protótipo, obtemos um resultado muito satisfatório, pois superou todas as expectativas empregadas. O tempo, a falta de recursos e conhecimento em determinadas áreas, foram uma barreira que foi transposta com o trabalho de cada um dos indivíduos do grupo.
Em suma, o processo de criação garantiu a experiência de desenvolvimento tecnológico, impulsionando a busca de novos saberes, verificando na prática a etapas citadas por Slack em seu livro, “Administração da Produção”.
Referências Bibliográficas
- ASKIX. Seguidor Solar de Arduino. Disponível em: <https://goo.gl/gZ829F> (acesso em 12 de Set. de 2018);
- HIGINIO, Humberto. Seguidor Solar - Arduino Solar Tracker - Construccion paso a paso. 16 de Out. de 2016. Disponível em: <https://youtu.be/BRQDa-LKdLU> (acesso em 12 de Set. de 2018);
ARDUINO LABS. Girassol, siga a luz!. 27 de Abr. de 2012. Disponível em: < https://goo.gl/cpXAmv> (acesso em 12 de Set. de 2018);- ROMÃO, Aracelly. G1. Milhões de brasileiros ainda não têm energia em casa, diz Aneel. 3 de Abr. de 2017. Disponível em: <https://goo.gl/Nx15A7> (acesso em 3 de Out. de 2018);
- PORTAL SOLAR. Seguidor Solar - Tracker: Vantagens e desvantagens parte 1. Disponível em: <https://goo.gl/1bLJBQ> (acesso em 3 de Out. de 2018);
- LEITE, João C. Notas de aula de engenharia de software - Design de interfaces de usuário. Disponível em: <https://goo.gl/7hPcHV> (acesso em 3 de Out. de 2018);
- LAB. DE GARAGEM. Tutorial Arduino - Motor de Passo 28BYJ-48 + driver ULN2003. Disponível em: <https://goo.gl/1qP7i7> (acesso em 27 de Nov. de 2018);
Comentários
Postar um comentário